■電動ガンを装備した多脚歩行ロボットによるサバイバルゲームを実現します。
■運営側で用意したフィールド内で、多脚ロボットを操縦し、オペレーションをクリアします。
■多脚ロボットの操縦は「ENTRY」からネットワーク上のraspberryPIにログインし行います。

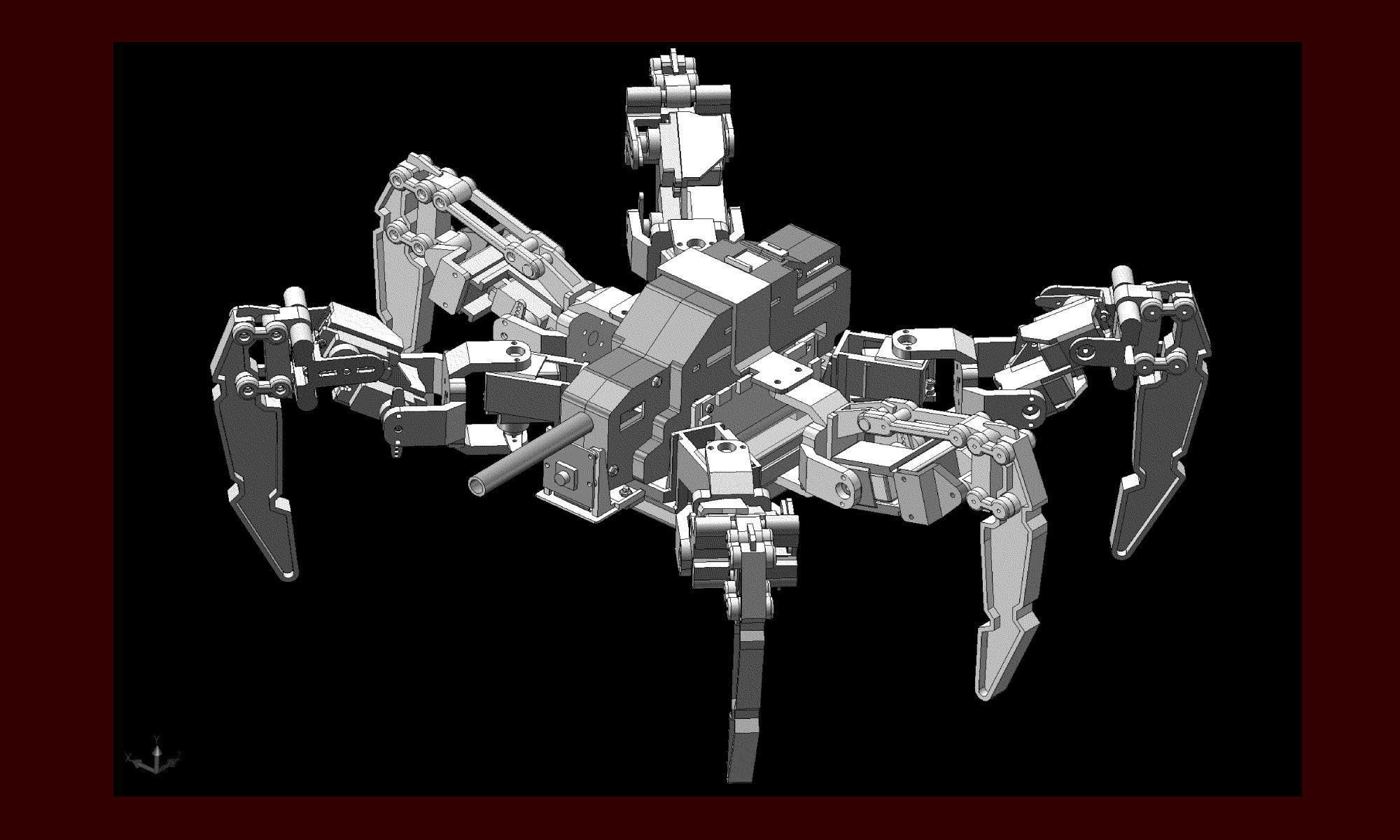
Survival Game Robot
■電動ガンを装備した多脚歩行ロボットによるサバイバルゲームを実現します。
■運営側で用意したフィールド内で、多脚ロボットを操縦し、オペレーションをクリアします。
■多脚ロボットの操縦は「ENTRY」からネットワーク上のraspberryPIにログインし行います。